Pan Tilt Sistemleri

Dengeli İki Eksen Hareket Kontrollü Platform
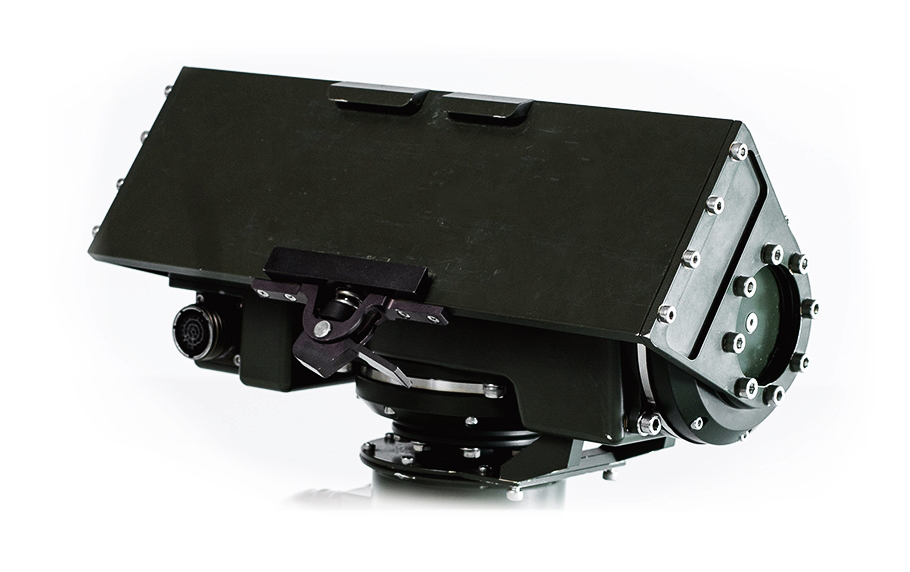
Askeri standartları sağlayan bu platform ile faydalı yükler iki eksende dengeli bir şekilde yönlendirilebilmektedir. Platformun hem yatay hem düşey eksende, pozisyon ve hız kontrolü sağlanmaktadır, hızı istenilen şekilde ayarlanabilmektedir. Sunduğu arayüz sayesinde sistem işlevleri, herhangi bir bilgisayarda koşturulan bir arayüz yazılımı ve/veya Kontrol Birimi vasıtasıyla kontrol edilebilmektedir. Servis arayüzü sayesinde de PID parametreleri, Hareket Aralığı, Hız Değerleri ve İvme Değerleri ayarlarlanabilmektedir.
Mini İki Eksen Hareket Kontrollü Platform
Askeri standartları sağlayan bu platform ile faydalı yükler iki eksende dengeli bir şekilde yönlendirilebilmektedir. Platformun hem yatay hem düşey eksende, pozisyon ve hız kontrolü sağlanmaktadır, hızı istenilen şekilde ayarlanabilmektedir. Sunduğu arayüz sayesinde sistem işlevleri, herhangi bir bilgisayarda koşturulan bir arayüz yazılımı ve/veya Kontrol Birimi vasıtasıyla kontrol edilebilmektedir. Servis arayüzü sayesinde de PID parametreleri, Hareket Aralığı, Hız Değerleri ve İvme Değerleri ayarlarlanabilmektedir.
Web Tasarım & Yazılım UX Ajans Yazılım & Medya